注意
前往末尾 下载完整的示例代码。
图的生成模型
作者:Mufei Li, Lingfan Yu, Zheng Zhang
警告
本教程旨在通过代码作为解释手段,深入理解论文。因此,实现未针对运行效率进行优化。对于推荐的实现,请参考官方示例。
在本教程中,您将学习如何一次训练和生成一个图。您还将探索图嵌入操作中的并行性,这是必不可少的构建块。本教程最后介绍了一个简单的优化,通过对多个图进行批处理,速度可以提高一倍。
之前的教程展示了如何嵌入图或节点,以便处理诸如节点的半监督分类或情感分析等任务。预测图的未来演变并迭代地执行分析岂不是很有趣?
为了解决图的演变问题,您需要生成各种图样本。换句话说,您需要图的生成模型。除了学习节点和边的特征外,您还需要对任意图的分布进行建模。虽然一般的生成模型可以显式和隐式地建模密度函数,并一次性或顺序地生成样本,但本教程只关注用于顺序生成的显式生成模型。典型应用包括药物或材料发现、化学过程或蛋白质组学。
引言
在深度图库 (DGL) 中,修改图的基本操作不过是add_nodes 和 add_edges。也就是说,如果您要绘制一个包含三个节点的圆圈,

您可以编写如下代码。
import os
os.environ["DGLBACKEND"] = "pytorch"
import dgl
g = dgl.DGLGraph()
g.add_nodes(1) # Add node 0
g.add_nodes(1) # Add node 1
# Edges in DGLGraph are directed by default.
# For undirected edges, add edges for both directions.
g.add_edges([1, 0], [0, 1]) # Add edges (1, 0), (0, 1)
g.add_nodes(1) # Add node 2
g.add_edges([2, 1], [1, 2]) # Add edges (2, 1), (1, 2)
g.add_edges([2, 0], [0, 2]) # Add edges (2, 0), (0, 2)
/dgl/python/dgl/heterograph.py:92: DGLWarning: Recommend creating graphs by `dgl.graph(data)` instead of `dgl.DGLGraph(data)`.
dgl_warning(
现实世界的图要复杂得多。存在许多不同类型的图,它们具有不同的尺寸、拓扑结构、节点类型、边类型以及多图的可能性。此外,同一个图可以通过许多不同的顺序生成。无论如何,生成过程都包含以下几个步骤。
编码一个不断变化的图。
随机执行动作。
如果您正在训练,收集误差信号并优化模型参数。
在实现方面,另一个重要方面是速度。考虑到生成图本质上是一个顺序过程,您如何并行化计算?
注意
当然,这不一定是一个硬性约束。子图可以并行构建,然后再组装。但本教程我们将仅限于顺序过程。
DGMG:主要流程
在本教程中,您将使用深度图生成模型 (DGMG) 使用 DGL 实现图生成模型。其算法框架通用,但也难以并行化。
注意
虽然 DGMG 可以处理具有类型节点、类型边和多图的复杂图,但这里您将使用其简化版本来生成图的拓扑结构。
DGMG 通过遵循一个状态机来生成图,该状态机本质上是一个两级循环。一次生成一个节点,并将其连接到现有节点的一个子集,一次连接一个。这类似于语言建模。生成过程是一个迭代过程,它一次发出一个词、字符或句子,并以迄今为止生成的序列为条件。
- 在每个时间步,您可以选择
向图中添加一个新节点
选择两个现有节点并在它们之间添加一条边
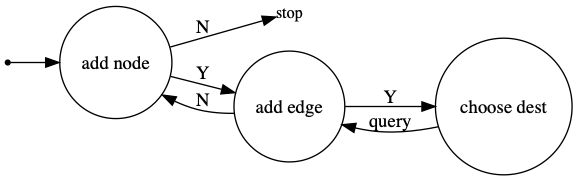
Python 代码如下所示。事实上,这正是 DGL 中 DGMG 推理的实现方式。
def forward_inference(self):
stop = self.add_node_and_update()
while (not stop) and (self.g.num_nodes() < self.v_max + 1):
num_trials = 0
to_add_edge = self.add_edge_or_not()
while to_add_edge and (num_trials < self.g.num_nodes() - 1):
self.choose_dest_and_update()
num_trials += 1
to_add_edge = self.add_edge_or_not()
stop = self.add_node_and_update()
return self.g
假设您有一个预训练模型,用于生成 10-20 个节点的环。它如何在推理过程中即时生成一个环?使用以下代码利用您自己的模型创建动画。
import torch
import matplotlib.animation as animation
import matplotlib.pyplot as plt
import networkx as nx
from copy import deepcopy
if __name__ == '__main__':
# pre-trained model saved with path ./model.pth
model = torch.load('./model.pth')
model.eval()
g = model()
src_list = g.edges()[1]
dest_list = g.edges()[0]
evolution = []
nx_g = nx.Graph()
evolution.append(deepcopy(nx_g))
for i in range(0, len(src_list), 2):
src = src_list[i].item()
dest = dest_list[i].item()
if src not in nx_g.nodes():
nx_g.add_node(src)
evolution.append(deepcopy(nx_g))
if dest not in nx_g.nodes():
nx_g.add_node(dest)
evolution.append(deepcopy(nx_g))
nx_g.add_edges_from([(src, dest), (dest, src)])
evolution.append(deepcopy(nx_g))
def animate(i):
ax.cla()
g_t = evolution[i]
nx.draw_circular(g_t, with_labels=True, ax=ax,
node_color=['#FEBD69'] * g_t.num_nodes())
fig, ax = plt.subplots()
ani = animation.FuncAnimation(fig, animate,
frames=len(evolution),
interval=600)

DGMG:优化目标
类似于语言建模,DGMG 使用行为克隆或教师强制来训练模型。假设对于每个图,存在一个生成它的神谕动作序列 \(a_{1},\cdots,a_{T}\)。模型所做的是遵循这些动作,计算此类动作序列的联合概率,并将其最大化。
根据链式法则,执行 \(a_{1},\cdots,a_{T}\) 的概率为
优化目标就是典型的 MLE 损失
def forward_train(self, actions):
"""
- actions: list
- Contains a_1, ..., a_T described above
- self.prepare_for_train()
- Initializes self.action_step to be 0, which will get
incremented by 1 every time it is called.
- Initializes objects recording log p(a_t|a_1,...a_{t-1})
Returns
-------
- self.get_log_prob(): log p(a_1, ..., a_T)
"""
self.prepare_for_train()
stop = self.add_node_and_update(a=actions[self.action_step])
while not stop:
to_add_edge = self.add_edge_or_not(a=actions[self.action_step])
while to_add_edge:
self.choose_dest_and_update(a=actions[self.action_step])
to_add_edge = self.add_edge_or_not(a=actions[self.action_step])
stop = self.add_node_and_update(a=actions[self.action_step])
return self.get_log_prob()
forward_train 和 forward_inference 的关键区别在于训练过程将神谕动作作为输入并返回用于评估损失的对数概率。
DGMG:实现
DGMG 类
下面是模型的骨架代码。您将逐步填写每个函数的详细信息。
import torch.nn as nn
class DGMGSkeleton(nn.Module):
def __init__(self, v_max):
"""
Parameters
----------
v_max: int
Max number of nodes considered
"""
super(DGMGSkeleton, self).__init__()
# Graph configuration
self.v_max = v_max
def add_node_and_update(self, a=None):
"""Decide if to add a new node.
If a new node should be added, update the graph."""
return NotImplementedError
def add_edge_or_not(self, a=None):
"""Decide if a new edge should be added."""
return NotImplementedError
def choose_dest_and_update(self, a=None):
"""Choose destination and connect it to the latest node.
Add edges for both directions and update the graph."""
return NotImplementedError
def forward_train(self, actions):
"""Forward at training time. It records the probability
of generating a ground truth graph following the actions."""
return NotImplementedError
def forward_inference(self):
"""Forward at inference time.
It generates graphs on the fly."""
return NotImplementedError
def forward(self, actions=None):
# The graph you will work on
self.g = dgl.DGLGraph()
# If there are some features for nodes and edges,
# zero tensors will be set for those of new nodes and edges.
self.g.set_n_initializer(dgl.frame.zero_initializer)
self.g.set_e_initializer(dgl.frame.zero_initializer)
if self.training:
return self.forward_train(actions=actions)
else:
return self.forward_inference()
编码动态图
生成图的所有动作都从概率分布中采样。为此,您需要将结构化数据,即图,投影到欧几里得空间。挑战在于这个称为嵌入的过程需要随着图的变异而重复进行。
图嵌入
设 \(G=(V,E)\) 是任意图。每个节点 \(v\) 都有一个嵌入向量 \(\textbf{h}_{v} \in \mathbb{R}^{n}\)。类似地,图有一个嵌入向量 \(\textbf{h}_{G} \in \mathbb{R}^{k}\)。通常,\(k > n\),因为图比单个节点包含更多信息。
图嵌入是节点嵌入在线性变换下的加权和
第一项 \(\text{Sigmoid}(g_m(\textbf{h}_{v}))\) 计算一个门控函数,可以认为是整体图嵌入对每个节点的关注程度。第二项 \(f_{m}:\mathbb{R}^{n}\rightarrow\mathbb{R}^{k}\) 将节点嵌入映射到图嵌入空间。
将图嵌入实现为一个 GraphEmbed 类。
import torch
class GraphEmbed(nn.Module):
def __init__(self, node_hidden_size):
super(GraphEmbed, self).__init__()
# Setting from the paper
self.graph_hidden_size = 2 * node_hidden_size
# Embed graphs
self.node_gating = nn.Sequential(
nn.Linear(node_hidden_size, 1), nn.Sigmoid()
)
self.node_to_graph = nn.Linear(node_hidden_size, self.graph_hidden_size)
def forward(self, g):
if g.num_nodes() == 0:
return torch.zeros(1, self.graph_hidden_size)
else:
# Node features are stored as hv in ndata.
hvs = g.ndata["hv"]
return (self.node_gating(hvs) * self.node_to_graph(hvs)).sum(
0, keepdim=True
)
通过图传播更新节点嵌入
DGMG 中更新节点嵌入的机制类似于图卷积网络。对于图中的节点 \(v\),其邻居 \(u\) 向其发送消息,消息内容为
其中 \(\textbf{x}_{u,v}\) 是 \(u\) 和 \(v\) 之间边的嵌入。
在接收到所有邻居的消息后,\(v\) 使用节点激活向量汇总这些消息
并利用此信息更新其自身特征
同步地对所有节点执行上述所有操作一次称为一轮图传播。您执行的图传播轮数越多,消息在图上传播的距离就越长。
使用 DGL,您可以使用 g.update_all 实现图传播。这里的消息记法可能有点令人困惑。研究人员可以将 \(\textbf{m}_{u\rightarrow v}\) 称为消息,但是下面的消息函数只传递 \(\text{concat}([\textbf{h}_{u}, \textbf{x}_{u, v}])\)。然后为了效率考虑,操作 \(\textbf{W}_{m}\text{concat}([\textbf{h}_{v}, \textbf{h}_{u}, \textbf{x}_{u, v}]) + \textbf{b}_{m}\) 会一次性在所有边上执行。
from functools import partial
class GraphProp(nn.Module):
def __init__(self, num_prop_rounds, node_hidden_size):
super(GraphProp, self).__init__()
self.num_prop_rounds = num_prop_rounds
# Setting from the paper
self.node_activation_hidden_size = 2 * node_hidden_size
message_funcs = []
node_update_funcs = []
self.reduce_funcs = []
for t in range(num_prop_rounds):
# input being [hv, hu, xuv]
message_funcs.append(
nn.Linear(
2 * node_hidden_size + 1, self.node_activation_hidden_size
)
)
self.reduce_funcs.append(partial(self.dgmg_reduce, round=t))
node_update_funcs.append(
nn.GRUCell(self.node_activation_hidden_size, node_hidden_size)
)
self.message_funcs = nn.ModuleList(message_funcs)
self.node_update_funcs = nn.ModuleList(node_update_funcs)
def dgmg_msg(self, edges):
"""For an edge u->v, return concat([h_u, x_uv])"""
return {"m": torch.cat([edges.src["hv"], edges.data["he"]], dim=1)}
def dgmg_reduce(self, nodes, round):
hv_old = nodes.data["hv"]
m = nodes.mailbox["m"]
message = torch.cat(
[hv_old.unsqueeze(1).expand(-1, m.size(1), -1), m], dim=2
)
node_activation = (self.message_funcs[round](message)).sum(1)
return {"a": node_activation}
def forward(self, g):
if g.num_edges() > 0:
for t in range(self.num_prop_rounds):
g.update_all(
message_func=self.dgmg_msg, reduce_func=self.reduce_funcs[t]
)
g.ndata["hv"] = self.node_update_funcs[t](
g.ndata["a"], g.ndata["hv"]
)
动作
所有动作都从使用神经网络参数化的分布中采样,下面依次介绍。
动作 1:添加节点
给定图嵌入向量 \(\textbf{h}_{G}\),评估
然后用于参数化一个 Bernoulli 分布,以决定是否添加新节点。
如果要添加新节点,使用以下方式初始化其特征
其中 \(\textbf{h}_{\text{init}}\) 是用于无类型节点的可学习嵌入模块。
import torch.nn.functional as F
from torch.distributions import Bernoulli
def bernoulli_action_log_prob(logit, action):
"""Calculate the log p of an action with respect to a Bernoulli
distribution. Use logit rather than prob for numerical stability."""
if action == 0:
return F.logsigmoid(-logit)
else:
return F.logsigmoid(logit)
class AddNode(nn.Module):
def __init__(self, graph_embed_func, node_hidden_size):
super(AddNode, self).__init__()
self.graph_op = {"embed": graph_embed_func}
self.stop = 1
self.add_node = nn.Linear(graph_embed_func.graph_hidden_size, 1)
# If to add a node, initialize its hv
self.node_type_embed = nn.Embedding(1, node_hidden_size)
self.initialize_hv = nn.Linear(
node_hidden_size + graph_embed_func.graph_hidden_size,
node_hidden_size,
)
self.init_node_activation = torch.zeros(1, 2 * node_hidden_size)
def _initialize_node_repr(self, g, node_type, graph_embed):
"""Whenver a node is added, initialize its representation."""
num_nodes = g.num_nodes()
hv_init = self.initialize_hv(
torch.cat(
[
self.node_type_embed(torch.LongTensor([node_type])),
graph_embed,
],
dim=1,
)
)
g.nodes[num_nodes - 1].data["hv"] = hv_init
g.nodes[num_nodes - 1].data["a"] = self.init_node_activation
def prepare_training(self):
self.log_prob = []
def forward(self, g, action=None):
graph_embed = self.graph_op["embed"](g)
logit = self.add_node(graph_embed)
prob = torch.sigmoid(logit)
if not self.training:
action = Bernoulli(prob).sample().item()
stop = bool(action == self.stop)
if not stop:
g.add_nodes(1)
self._initialize_node_repr(g, action, graph_embed)
if self.training:
sample_log_prob = bernoulli_action_log_prob(logit, action)
self.log_prob.append(sample_log_prob)
return stop
动作 2:添加边
给定图嵌入向量 \(\textbf{h}_{G}\) 和最新节点 \(v\) 的节点嵌入向量 \(\textbf{h}_{v}\),您评估
然后用于参数化一个 Bernoulli 分布,以决定是否添加一条从 \(v\) 开始的新边。
class AddEdge(nn.Module):
def __init__(self, graph_embed_func, node_hidden_size):
super(AddEdge, self).__init__()
self.graph_op = {"embed": graph_embed_func}
self.add_edge = nn.Linear(
graph_embed_func.graph_hidden_size + node_hidden_size, 1
)
def prepare_training(self):
self.log_prob = []
def forward(self, g, action=None):
graph_embed = self.graph_op["embed"](g)
src_embed = g.nodes[g.num_nodes() - 1].data["hv"]
logit = self.add_edge(torch.cat([graph_embed, src_embed], dim=1))
prob = torch.sigmoid(logit)
if self.training:
sample_log_prob = bernoulli_action_log_prob(logit, action)
self.log_prob.append(sample_log_prob)
else:
action = Bernoulli(prob).sample().item()
to_add_edge = bool(action == 0)
return to_add_edge
动作 3:选择目标节点
当动作 2 返回 True 时,为最新节点 \(v\) 选择一个目标节点。
对于每个可能的目标节点 \(u\in\{0, \cdots, v-1\}\),选择它的概率由下式给出
from torch.distributions import Categorical
class ChooseDestAndUpdate(nn.Module):
def __init__(self, graph_prop_func, node_hidden_size):
super(ChooseDestAndUpdate, self).__init__()
self.graph_op = {"prop": graph_prop_func}
self.choose_dest = nn.Linear(2 * node_hidden_size, 1)
def _initialize_edge_repr(self, g, src_list, dest_list):
# For untyped edges, only add 1 to indicate its existence.
# For multiple edge types, use a one-hot representation
# or an embedding module.
edge_repr = torch.ones(len(src_list), 1)
g.edges[src_list, dest_list].data["he"] = edge_repr
def prepare_training(self):
self.log_prob = []
def forward(self, g, dest):
src = g.num_nodes() - 1
possible_dests = range(src)
src_embed_expand = g.nodes[src].data["hv"].expand(src, -1)
possible_dests_embed = g.nodes[possible_dests].data["hv"]
dests_scores = self.choose_dest(
torch.cat([possible_dests_embed, src_embed_expand], dim=1)
).view(1, -1)
dests_probs = F.softmax(dests_scores, dim=1)
if not self.training:
dest = Categorical(dests_probs).sample().item()
if not g.has_edges_between(src, dest):
# For undirected graphs, add edges for both directions
# so that you can perform graph propagation.
src_list = [src, dest]
dest_list = [dest, src]
g.add_edges(src_list, dest_list)
self._initialize_edge_repr(g, src_list, dest_list)
self.graph_op["prop"](g)
if self.training:
if dests_probs.nelement() > 1:
self.log_prob.append(
F.log_softmax(dests_scores, dim=1)[:, dest : dest + 1]
)
整合
您现在可以进行完整的模型类实现了。
class DGMG(DGMGSkeleton):
def __init__(self, v_max, node_hidden_size, num_prop_rounds):
super(DGMG, self).__init__(v_max)
# Graph embedding module
self.graph_embed = GraphEmbed(node_hidden_size)
# Graph propagation module
self.graph_prop = GraphProp(num_prop_rounds, node_hidden_size)
# Actions
self.add_node_agent = AddNode(self.graph_embed, node_hidden_size)
self.add_edge_agent = AddEdge(self.graph_embed, node_hidden_size)
self.choose_dest_agent = ChooseDestAndUpdate(
self.graph_prop, node_hidden_size
)
# Forward functions
self.forward_train = partial(forward_train, self=self)
self.forward_inference = partial(forward_inference, self=self)
@property
def action_step(self):
old_step_count = self.step_count
self.step_count += 1
return old_step_count
def prepare_for_train(self):
self.step_count = 0
self.add_node_agent.prepare_training()
self.add_edge_agent.prepare_training()
self.choose_dest_agent.prepare_training()
def add_node_and_update(self, a=None):
"""Decide if to add a new node.
If a new node should be added, update the graph."""
return self.add_node_agent(self.g, a)
def add_edge_or_not(self, a=None):
"""Decide if a new edge should be added."""
return self.add_edge_agent(self.g, a)
def choose_dest_and_update(self, a=None):
"""Choose destination and connect it to the latest node.
Add edges for both directions and update the graph."""
self.choose_dest_agent(self.g, a)
def get_log_prob(self):
add_node_log_p = torch.cat(self.add_node_agent.log_prob).sum()
add_edge_log_p = torch.cat(self.add_edge_agent.log_prob).sum()
choose_dest_log_p = torch.cat(self.choose_dest_agent.log_prob).sum()
return add_node_log_p + add_edge_log_p + choose_dest_log_p
下面是一个动画,展示了在前 400 个训练批次中,每训练 10 个批次后即时生成的图。您可以看到模型随着时间的推移如何改进并开始生成环。
对于生成模型,您可以通过检查其即时生成的图中有多少是有效图来评估性能。
import torch.utils.model_zoo as model_zoo
# Download a pre-trained model state dict for generating cycles with 10-20 nodes.
state_dict = model_zoo.load_url(
"https://data.dgl.ai/model/dgmg_cycles-5a0c40be.pth"
)
model = DGMG(v_max=20, node_hidden_size=16, num_prop_rounds=2)
model.load_state_dict(state_dict)
model.eval()
def is_valid(g):
# Check if g is a cycle having 10-20 nodes.
def _get_previous(i, v_max):
if i == 0:
return v_max
else:
return i - 1
def _get_next(i, v_max):
if i == v_max:
return 0
else:
return i + 1
size = g.num_nodes()
if size < 10 or size > 20:
return False
for node in range(size):
neighbors = g.successors(node)
if len(neighbors) != 2:
return False
if _get_previous(node, size - 1) not in neighbors:
return False
if _get_next(node, size - 1) not in neighbors:
return False
return True
num_valid = 0
for i in range(100):
g = model()
num_valid += is_valid(g)
del model
print("Among 100 graphs generated, {}% are valid.".format(num_valid))
Downloading: "https://data.dgl.ai/model/dgmg_cycles-5a0c40be.pth" to /root/.cache/torch/hub/checkpoints/dgmg_cycles-5a0c40be.pth
0%| | 0.00/37.1k [00:00<?, ?B/s]
100%|██████████| 37.1k/37.1k [00:00<00:00, 6.08MB/s]
Among 100 graphs generated, 93% are valid.
有关完整的实现,请参见DGL DGMG 示例。
脚本总运行时间: (0 分钟 13.005 秒)